|
|
|
|
In general, se opereaza cu puteri descrescatoare ale lui 2, in ideea ca rezultatul sa fie exprimat direct sub forma de numar binar. Intrucit mesajul transmis are o lungime finita, se poate considera ca Neste aproximarea cea mai apropiata de rezultat, tinind seama de rezolutia sistemului.
Semnalul analogic, A ,ce urmeaza sa fie convertit poate fi scris sub forma:
Lungimea cuvantului binar obtinut dupa conversie fiind limitata
la n biti, impartirea lui A prin
V![]() trebuie oprita la ordinul n si rezulta:
trebuie oprita la ordinul n si rezulta:
Termenii neglijati b
![]() ,b
,b![]() ,…,reprezinta
eroarea de conversie, numita si eroare de cuantizare.
,…,reprezinta
eroarea de conversie, numita si eroare de cuantizare.
Conversia analog-numerica realizeaza o cuantizare care consta din
inlocuirea tensiunii Aprintr-o tensiune discreta multiplicate prin pasul de cuantizare, de valoare
V![]() /2
/2
![]() , in asa fel incat diferenta dintre
A si aceasta tensiune sa fie inferioara in modul unei jumatati de pas de cuantificare astfel:
, in asa fel incat diferenta dintre
A si aceasta tensiune sa fie inferioara in modul unei jumatati de pas de cuantificare astfel:
CAN-urile sunt fi realizate in general in doua feluri: [10]
-convertoare cu integrare in doua pante ;
-convertoare cu aproximare succesiva
Ambele tipuri de convertoare transforma o tensiune de intrare intr-un cod numeric proportional cu tensiunea de intrare.
Convertoarele analog-numerice cu integrare in doua pante contin un integrator, o schema de control logic, un generator de tact si un numarator de iesire.
Acest
tip de convertor numara succesiunea de impulsuri de tact, a carei
valoare depinde de amplitudinea semnalului integrat in integrator.
Timpul specific de conversie este dat de produsul dintre doua
perioade de tact si numarul de nivele de cuantizare. Astfel, pentru
un convertor de 12 biti cu tact de 1 Mhz, timpul de conversie va fi 2x1
![]() s x 4096 adica 8192
s x 4096 adica 8192
![]() s.
Acesta este un timp mult mai mare decat in cazul unui convertor cu
aproximare succesiva avand aceeasi frecventa de tact.
s.
Acesta este un timp mult mai mare decat in cazul unui convertor cu
aproximare succesiva avand aceeasi frecventa de tact.
Convertorul cu integrare costa mai putin decat un convertor cu aproximare succesiva
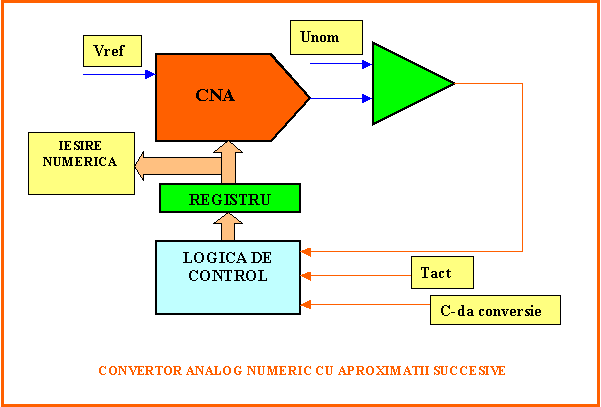
Convertoarele analog-numerice cu aproximare succesiva sunt folosite in general in sistemele de conversie conectate la calculatoare deoarece efectueaza conversia cu viteza si precizie suficient de mare pentru a furniza calculatorului date in tim real.
Ideal, convertoarele ar trebui sa faca conversii instantanee si sa realizeze o esantionare in puncta. Pentru un convertor real, in general semnalul de intrare variaza in timpul intervalului de conversie. Aceasta produce o incertitudine in privinta amplitudinii reale a semnalului de intrare in momentul masurarii. Cu un circuit de esantionare cu retinere amplasat inaintea convertorului, timpul de incertitudine este redus la incertitudinea de deschidere a circuitului de esantionare cu memorare.
Acest
tip de convertor necesita un timp de conversie egal cu produsul
dintre perioada de tact si numarul de biti cu care se efectueaza
conversia. Pentru un convertor de 12 biti si cu frecventa tactului de
1 Mhz timpul de conversie este de 12![]() s.
s.
In principiu un convertor analog-numerice cu aproximare succesiva consta dintr-un convertor numeric-analogic controlat printr-o schema de decizie logica si a carui iesire este comparata cu tensiunea analogica de intrare. Tensiunea de intrare este aplicata pe o intrare a comparatorului, cealalta intrare fiind conectata la iesirea convertorului numeric-analogic intern.
La aplicarea comenzii de conversie, convertorul este adus la zero. Se aduce bitul cel mai semnificativ al al cuvantului de intrare al CAN la 1. Iesirea CAN este aplicata la intrarea comparatorului pentru a fi comparata cu nivelul de intrare necunoscut. Bitul cel mai semnificativ aplicat la intrarea in CAN produce la iesire echivalentul a jumatate din intreaga scala a convertoruiui. Daca tensiunea necunoscuta este mai mare decat jumatate din intreaga scala, 1 logic este transferat in pozitia bitului cel mai semnificativ al registrului de iesire. Daca tensiunea necunoscuta este mai mica decat jumatate din intreaga scala, 0 logic este transferat in pozitia bitului cel mai semnificativ al registrului de iesire. Apoi circuitul compara cu urmatorul bit din convertorul numeric-analogic intern si procedura continua in mod similar pana la bitul cel mai putin semnificativ, la care conversia este incheiata.
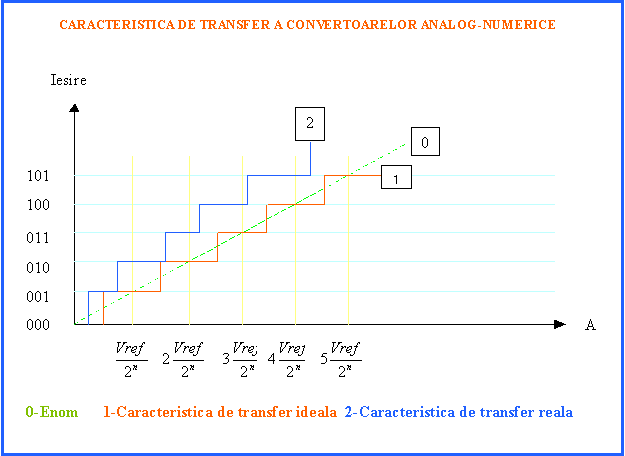
Functia ideala de transfer [10] este data de ecuatiile:
Graficul 1 reprezinta caracteristica ideala a convertorului, raficul 2 reprezinta caracteristica reala a convertorului.
Tranzitiile
se produc pentru tensiuni E![]() +
+![]() ,
presupunand o cuantificare uniforma.
,
presupunand o cuantificare uniforma.
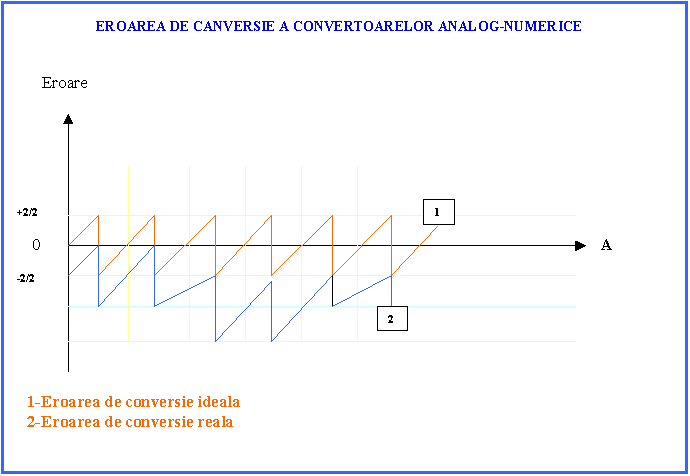
Eroarea de conversie corespunzatoare, presupunand o cuantizare uniforma, este
data de diferenta A-E![]()
Modulul
acestei erori este mai mic sau egal cu
![]() ,
iar limita ei este eroarea de cuantizare.
,
iar limita ei este eroarea de cuantizare.
Rezolutia este data de numarul de biti ai convertorului. Rezolutia defineste cea mai mica variatie a tensiunii pe care convertorul o poate coda si se exprima prin relatia:
R=1/2![]()
Timpul de conversie este timpul necesar pentru a obtine la iesire un semnal numeric proportional cu semnalul analogic de la intrare avand precizia dorita.
Pentru a cunoaste frecventa maxima de conversie posibila, la timpul de conversie trebuie adaugat si timpul aducerii convertorului la zero. De regula, acest timp este destul de mic si nu afecteaza semnificativ performantele convertorului.
Precizia
se defineste ca fiind diferenta dintre
valoarea teoretica a lui E![]() care produce un anumit cuvant N
la iesire si valoarea A
care genereaza efectiv acest cuvant.
care produce un anumit cuvant N
la iesire si valoarea A
care genereaza efectiv acest cuvant.
Anumite
convertoare analog-numerice au proprietatea ca pot diminua sau chiar
elimina unele semnale perturbatoare, in special ale tensiunii de
alimentare de alimentare de la retea. Se defineste un factor de
rejectie a tensiunii perturbatoare, S(![]() ),
ca raportul dintre zgomotul de intrare si valoarea tensiunii de intrare
),
ca raportul dintre zgomotul de intrare si valoarea tensiunii de intrare
Performantele CAN-urilor difera de cele teoretice din cauza erorilor.Caracteristica de transfer, nu are alura curbei 1 ci pe cea a curbei 2, din aceasta cauza rezulta urmatoarele diferente:
-tensiunile pentru care se produc tranzitiilor difera de cele corespunzatoare curbei 0
-portiunile orizontale nu au exact dimensiunea unui pas de cuantizare
-eroarea de cuantizare nu ramane in
intervalul (![]() …
…![]() )
)
Aceste diferentesunt datorate erorii de castig, erorii de decalaj, erorii de liniaritate, la care se adauga eroarea de cuantizare.
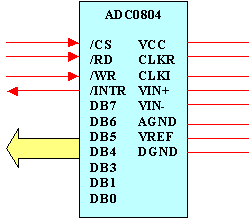
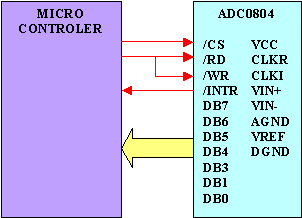
Unul din cele mai utilizate convertare CAN este convertorul ADC0804 produs de firma National Semiconductors. Este un convertor A/D cu aproximatii successive pe 8 biti cu precizie de +/-1/2 LSB. Permite intrare de tensiune diferentiala sau absoluta gratie intrarii AGND care poate fi legata la masa sau la un pol al tensiunii diferentiale. Dispune de clock intern, valoarea frecventei de oscilatie fiind stabilita de valorile R, respective C conectate la terminalele CLKR , CLKI
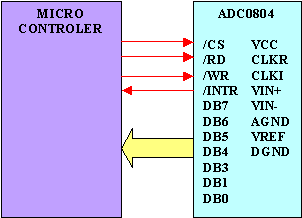
ADC 0804 poate fi conectat cu usurinta la sisteme microprogramate realizate cu microprocesoare sau controlere. Unitatea centrala a sistemului DASYS este echipata cu un astfel de convertor
Exista mai multe moduri de comanda a circuitului. Exista posibilitatea sa se comande separate faza de startare a achizitiei si separate faza de citire date.
Acesata se realizeaza cu o schema de principiu de tipul celei de mai jos:
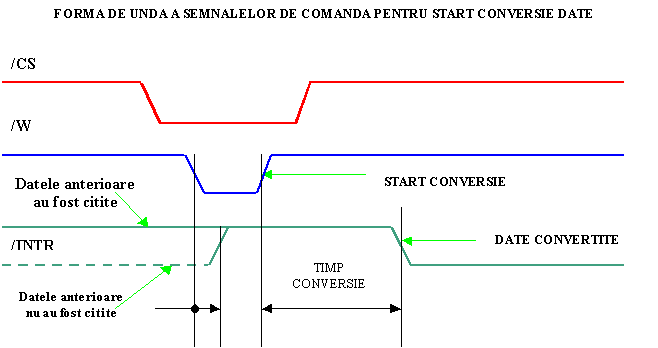
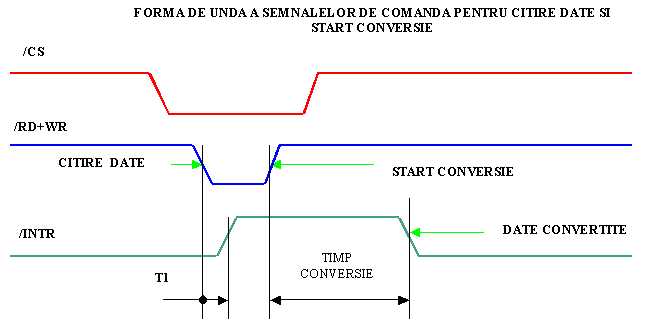
Formele de unda ale semnalelor de comanda [20] care initiaza inceperea unei converii are urmatoarea forma:
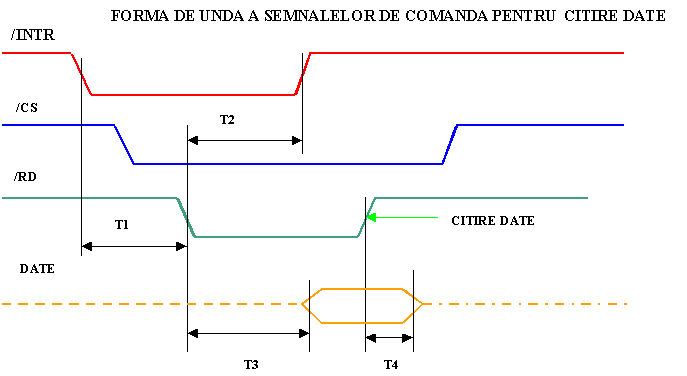
In vederea citirii datelor convertite semnalele de comanda trebuie sa aiba forma:
Exista posibilitatea de a initia o conversie si de a citi datele aqnterior convertite intr-o singura faza. In acest caz ADC-ul trebuie conectat ca in figura de mai jos:
Formele de unda ale semnaleor de comanda trebuie sa respecte diagrama de jos:[20]
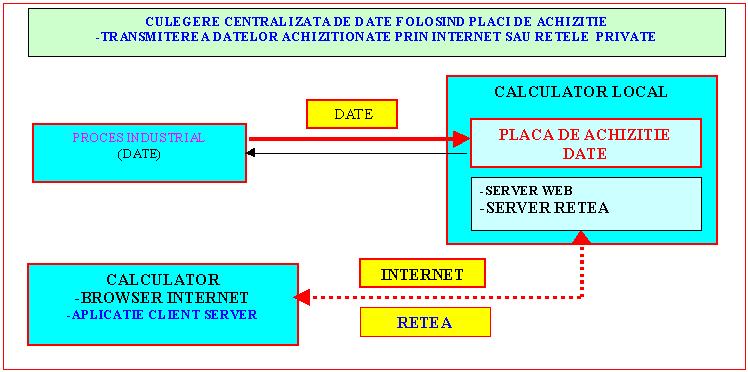
Culegerea de date cu ajutorul calculatorului PC presupune introducerea unei placi de achizitie, intr-un slot al placii de baza a calculatorului
Transferul de date ce are loc intre placa de achizitie si calculator trebuie
efectuat la viteza si cantitatea de date impuse de sistemul
monitorizat. Ideal ar fi ca viteza si cantitatea maxima de date pe
care vrem sa le culegem din exterior sa depinda numai de parametrii
functionali ai placii de achizitie. Din pacate comunicarea dintre
placa de achizitie si memoria calculatorului are limitari serioase
impuse de arhitectura PC-ului.
Exista trei posibilitati de comunicare intre placa de achizitie si calculator.
Pooling –registrul de stare al placii de achizitie este citit periodic dictat de un timer al CPU
Intreruperi –Placa de achizitie are capabilitatea de a intrerupe CPU de fiecare data cind trebuiesc transferate date
DMA –controlerul DMA (Direct Memary Acces) efectueaza transferul de date in paralel cu activitatea CPU
In figura de jos este reprezentat schematic principiul de achizitie prin aceasta metoda.
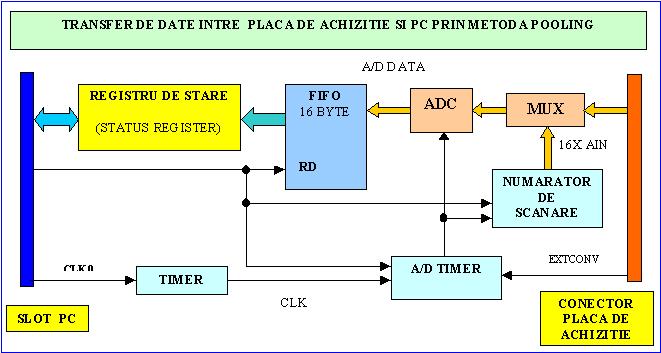
In figura de sus este reprezentat modul de achizitie pentru semnale de tip analogic. Partea de intrare analogica contine convertorul analogic digital (ADC), un timer A/D timer ce genereaza pulsurile de trigger ale fiecarei citiri, o memorie FIFO pe post de buffer care are rol de tampon de date intre doua citiri ale calcualatorului si un registru de stare ce pastreaza informatii referitoare la operatia de citire.
Secventa de operatii ce are loc pentru fiecare citire este urmatoarea:
Timerul genereaza un puls ce este trimis ADC-ului
ADC-ul executa o conversie
Valoarea digitala rezultata din conversie este depusa in buffer-ul FIFO
Bitul de stare numit DVALdin registrul de stare sete activat
Programul din calculator care initiaza un transfer trebuie sa contina urmatoarea secventa de instructiuni:
Se citeste registrul de stare
Daca DVAL este activ se copiaza continutul FIFO in memoria calculatorului altfel daca DVAL nu este activ se repeta algoritmul incepand cu punctul 1
Perioada de timp dintre initierea unei conversii si momentul cind DVAL este activ este singurul moment care poate fi precizat in transferul POOLING. Operatiile efectuate de CPU au durate variabile, in functie de ceasul CPU, gradul de incarcare al CPU etc. Convertorul ADC genereaza valorile digitale, la frecventa dorita, si le depund in FIFO. Placile de achizitie pot avea buffere FIFO cu marimi intre 16 si 2048 locatii.
Daca bufferul este plin, si o noua conversie are loc inainte ca bufferul sa fie citit de CPU in registrul de stare se pozitioneaza un bit de eroare. Aceasta eroare nu este fatala, adica achizitia de date poate continua.
Principala limitare a transferului de date de tip pooling, este faptul ca nu poate fi facut la intervale precise de timp. CPU executa instructiunile in ordine secventiala dar cu intreruperi generate de sistemul de intreruperi in vederea deservirii si altor procese. Folosind deci pooling nu se poate conta pe transferul datelor din FIFO in memorie la intervale precizate de timp, ceea ce poate duce la pierderea de valori din semnalul cules.
Transferul de tip pooling, este usor de implementat la nivelul registrilor placii, si poate fi folosit in operatii de achizitie lente (<30 Khz), in care operatiile executate asupra datelor culese nu sunt critice, timpul culegerii de date nefiind important, iar punctele de semnal sunt culese si procesate individual.
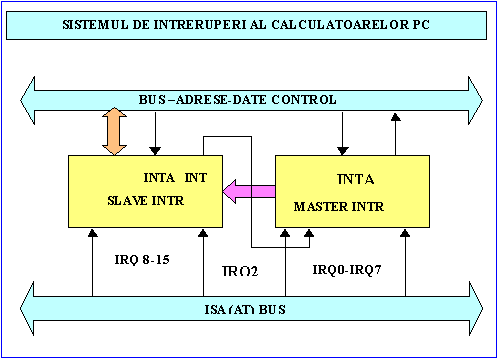
Arhitectura calculatorului PC este astfel conceputa incit procesorul sa poata deservi toate resursele calculatorului. Acest tip de arhitectura se bazeaza pe utilizarea intreruperilor. Intreruperile sunt semnale hardware careprovin de la periferice si care instiinteaza procesorul ca trebuie sa deserveasca un periferic(o anumita resursa).
Calculatoarele PC dispun de un controler de intrerupere programabil care furnizeaza 16 linii de intrerupere IRQ0-IRQ15. Intreruperile IRQ8-IRQ15 sunt prioritare liniilor IRQ3-IRQ17. In urma activarii unei linii de intrerupere, controlerul de intreruperi genereaza spre procesor un semnal numit INT. In momentul cind procesorul poate lua in considerare intreruperea, isi salveaza starea curenta pe stiva dupa care raspunde cu un semnal INTA pentru a anunta controlerul de intreruperi ca este gata sa trateze intreruperea in curs. Controlerul de intreruperi furnizeaza vectorul de intrerupere corespunzator intreruperii, iar procesorul pe baza vectorului furnizat gasete in tabela de intreruperi adresa rutinei de tratare a interuperii si lanseaza in executie rutina respectiva, dupa care revine in procesul initial prin citirea starii de pe stiva si reluarea procesului exact din momentul in care a fost intrerupt.
Infigura de jos este schitat sitemul hardware de intreruperi al unui PC:
Bazindu-se pe sistemul de intreruperi s-au conceput sisteme de achizitie care stabilesc legatura cu calculatorul prin intermediul intreruperilor. Sistemul de achizitie initiaza o achizitie de date. Dupa ce datele au fost achizitionate si stocate in buffere se lanseaza o cerere de intrerupere pe una din liniile de intrerupere. Procesorul trateaza aceasta intrerupere rulind o rutina specifica sistemului de achizitie prin care datele sunt citite din bufferul sistemului de achizitie si transfereate in memorie.
Schema bloc a unui astfel de sistem de achizitie ce utilizeaza intreruperile este prezentata mai jos:
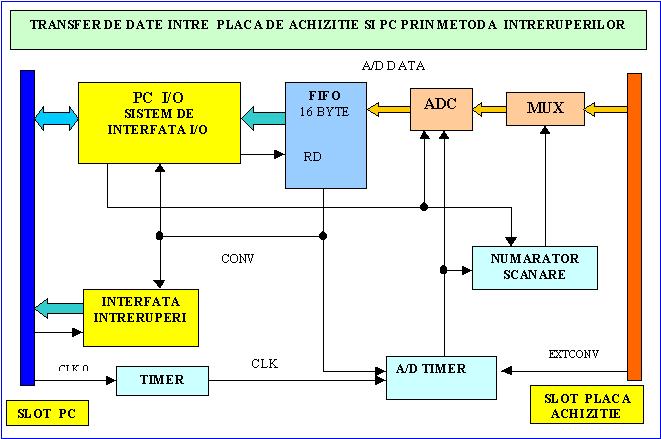
Ori de cite ori convertorul ADC efectueaza o conversie si o depune in memoria FIFO se activeaza senmalul CONV care prin intermediul interfetei de intreruperi activeaza o linie de intreruperi a controlerului de intreruperi. In momentul cind intrerupera este acceptata de procesor acesta executa rutina de tratare a acestei intreruperi respectiv rutina de tratare a sistemului de achizitie care citeste defapt continutul FIFO in memorie prin intermediul sistemului de I/O.
In urma citirii, numaratorul de scanare este incrementat, furnizind o noua adresa pentru multiplexorul de intrare care va selecta o alta intrare analogica in vederea conversiei. Se reteaza in acelasi timp timerul A/D care initiaza un nou ciclu de conversie analogica.
In concluzie secventa de operatii pentru fiecare citire este urmatoarea:
Timerul A/D genereaza un puls ce determina convertorul A/D sa inceapa un ciclu de conversie
Convertorul A/D efectueaza conversia
Valoarea digitala este transferata in FIFO
Se lanseaza o intrerupere prin intermediul interfetei de intrerupere
Se accepta intreruperea si este lansata de procesor rutina de intrerupere
Rutina de intrerupere citeste datele prin I/O si le depune in memorie
Se revine din rutina de intrerupere
Se incrementeaza numaratorul scanner si Timerul ADC trimite un nou semnal ce declanseaza o noua operatie de conversie
Se reia ciclul
Prin intermediul sistemelor de achizitie bazate pe intreruperi viteza maxima ramane sub 50 Khz chiar si cu sisteme de achizitie performante care dispun de convertoare rapide din cauza timpului relativ mare intre doua acceptari de intrerupere ale procesorului. Se cistiga insa timp prin eliminarea sau cel putin reducerea factorului de intirziiere din operatiile ce preced copierea bufferului FIFO in memoria RAM.
Intreruperea hardware, emisa de placa de achizitie, nu are prioritate maxima, deci acceptarea intreruperii poate sa intirzie daca alte periferice mai prioritare fac la rindul lor intreruperi. Cu toate acestea intreruperea sosita de la placa de achizitie in general este tratata imediat de procesor.
Transferul de date folosind intreruperi poate crea probleme daca executia rutinei de intrerupere ia prea mult timp sau daca procesorul consuma prea mult timp pentru acceptarea intreruperii.
In aceasta situatie se poate intimpla ca memoria FIFO sa genereze overflow, deci sa avem pierderi de date din cauza ca ritmul de citire al datelor este mai mic decit ritmul de conversie a datelor
Penrtu eliminarea acestor deficiente se utilizeaza o alta metoda de transfer, mult mai rapida si anume metoda de traqnsfer date prin transfer direct in memorie DMA-Direct Memory Acces.
Mecanismul cel mai eficient, pentru transferul datelor intre placile de achizitie si memoria calculatorului il reprezinta sistemul DMA.
Metoda de transfer DMA este mai rapida decit metodele tratate anterior (poolong, intreruperi) deaoarece procesorul CPU nu este implicat in transferul de date. Transferul este efectuat controlerul DMA al calculatoruluiin paralel cu activitatile curente ale procesorului CPU. Transferul de tip DMA este folosit in aplicatiile in care blocuri intregi de date trebuiesc transferate in memorie la viteze foarte mari.
In principiu arhitectura unui calculator care dispune de DMA si placa de achizitie date ce transfera datele prin intermediul DMA arata ca in schema bloc de mai jos.
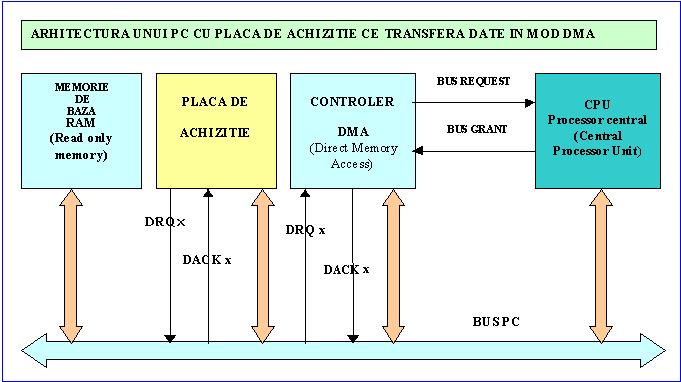
Transferul de date bazat pe DMA, consta in programarea sistemului de achizitie in vederea utilizarii capabilitatilor hardware de a cere transfer DMA si programarea controerului DMA pentru a accepta cererile DMA de la sistemul de achizitie si de a transfera datele in zona de memorie programata.
Pentru a realiza un transfer DMA intre placa de achizitie si memorie se parcurg urmatorii pasi.
Se programeaza controlerul DMA cu adresa de start ablocului de memorie urmeaza a fi umplut cu date, precum si numarul de locatii care vor fi transferate
Se programeaza placa de achizitie sa trimita semnalele de cerere de transfer, folosind linia DRQ x, ori de cite ori FIFO are date ce trebuiesc transferate.
Placa de achizitie trimite controolerului DMA un semnal DRQ x, semnal de cerere de transfer.
Controlerul DMA activeaza senmnalul Bus Request pentru a cere procesorului sa elibereze magistrala in vederea efectuarii transferului de date intre DMA si memorie prin intermediul BUS-ului comun.
Procesorul CPU cedeaza controlul asupra magistralei in favoarea sistemului DMA
Sistemul DMA activeaza semnalul DACK (acknowledge) pentru a anunta sistemul de achizitie ca cererea DMA a fost acceptata si poate incepe un transfer de date. DMA plaseaza pe bus-ul de adrese adresa de memorie din cadrul zonei de memorie in care se vor transfera datele, astfel incit octetul de date sa poata fi transferat de sistemul de achizitie direct in memorie.
Placa de achizitie scrie datele in memorie prin intermediul bus-ului PC si invalideaza semnalul DRQ
DMA formeaza o noua adresa pentru urmatorul octet de transferat si totodata numara octetii transferati din buff-erul FIFO al placii de achizitie, decrementind counterul care tine numarul de octeti care trebuie transferat
Se repeta algoritmul incepind cu punctul 3, pina cind counterul cu nr de octeti atinge valoarea 0, adica numarul de octeti programat la punctul 1 a fost deja transferat.
Exista mai multe moduri in care placa de achizitie activeaza semnalul DRQ. Astfel placa de achizitie poate cere transfer pentru fiecare octet de date din FIFO, caz in car avem de-a face cu un transfer DMA -single mode
Sistemul de achizitie poate fi programat in asa fel incit sa activeze semnalul DRQ pentru o perioada mai lunga pentru ca DMA sa poata face mai multe cicluri (3-9) deci sa transfere mai multe locatii pentru un singur DRQ. Acest mod de lucru cu DMA-ul se numeste DMA-demand mode.
Alta metoda de lucru este metoda DMA -bloc transfer prin care odata cererea de transfer acceptata, DRQ este pastrat activ pana la transferarea tuturor datelor din buff-er obligind deci DMA-ul sa tina bus-ul ocupat pana la transferul integral al datelor din FIFO
Sistemul de achizitie si transfer prin DMA poate fi reprezentat la nivel de schema bloc astfel:
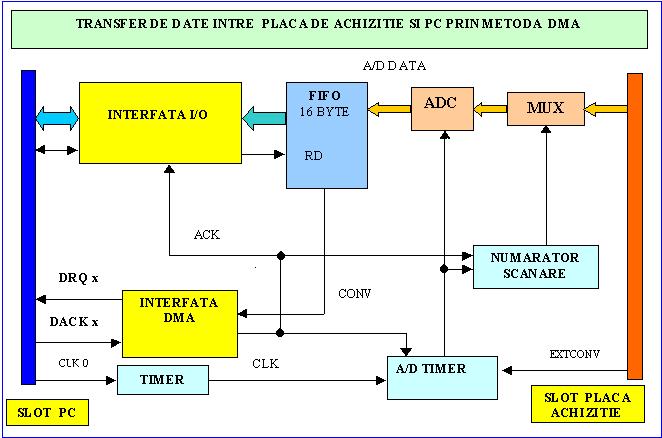
Secventa de operatii care are loc pentru fiecare transfer DMA este urmatoarea:
Se programeaza canalul DMA corespunzator si placa de achizitie pentru a stabili numarul de octeti transferati si adresa de memorie unde vor fi transferate datele.
Un urma unei conversii datele ajung in FIFO, care activeaza semnalul CONV, iar prin interfata DMA se activeaza semnalul DRQ pe magistrala calculatorului. Controlerul de DMA face o cerere de acordare a magistralei spre procesorul CPU prin activarea semnalului BUSREQUEST. Procesorul acorda magistrala si semnalizeaza prin activarea semnalului BUSGRANT.
Controlerul de DMA activeaza semnalul DACK x pentru a semnaliza faptul ca sunt indeplinite coditiile pentru a se face transferul de date.
Se face transferul numarului stabilit de octeti la adresa stabilita.
Semnalul DACK x prin interfata DMA genereaza un puls ACK care este trimis interfetei I/O pentru a permite transmiterea datelor pe magistrala. Tot semnalul ACK incrementeaza counterul de scanare care stabileste o noua adresa pentru multiplexorul analogic de la intrare De asemenea ACK reseteaza timerul A/D care genereaza noi pulsuri pentru convertorul A/D
Convertorul efectueaza noi conversii
Valoarea digitala rezultata din conversie rezultata din conversie este depusa in FIFO
Se lanseaza din nou o cerere spre DMA
Se reia ciclul de la punctul 2 sau de la punctul 1 daca se schimba numarul sau locul de memorare al datelor.
Viteza de culegere si transfer a datelor in acest mod poate atinge frecventa de 300-500 Khz in functie de ceasul procesorului. Este unul din cele mai rapide procedee de achizitie date si se preteaza in locuri unde e nevoie de cantitate mare de date de achizitionat in timp real.
Un alt avantaj al folosirii procedeului DMA il reprezinta faptul ca in paralel cu transferul datelor procesorul poate rula anumite instructiuni care nu necesita magistrala, deci eficienta ansamblului calculator sistem de achizitie creste. Se pot crea aplicatii in care in care sa se execute operatii simultane de genul achizitie transfer prelucrare prezentare, cu alte cuvinte chizitie, analiza si prezentare in timpm real.
Lungimea maxima a unui bloc de date transferat nu poate depasi 64 Ko din cauza limitarilor sistemului DMA. Dupa un astfel de transfer DMA-ul trebuie reprogramat cu o noua adresa de rtansfer date si cu noua dimensiune a blocului de transferat.
Din cauza faptului ca memoria unui calculator trebuie refresh-ata la fiecare 15 microsecunde si deci trebuie eliberat bus-ul la fiecare 15 microsecunde, metodele de transfer DMA de tip demand sau blok sunt aproape imposibil de implementat.
Sistemele de achizitie care comunica cu calculatorul prin intermediul portului serial vehiculeaza date in functie de viteza de comunicatie a portului serial chiar daca ele pot achizitiona date la viteze mult mai mari. In cazul in care calculatorul central are nevoie de o cantitate mai mare de date sistemele de achizitie seriale nu mai fac fata. O solutie ar fi sistemele de achizitie ce utilizeaza portul parallel pentru comunicatia de date.
Avand in vedere ca portul parallel furnizeaza o magistrala de date de 8 biti si o magistrala de comenzi de 9 biti dintre care 5 de intrare si 4 de iesire, se poate un transfer de date mult mai rapid. Un astfel de sistem de achizitie conectat la portul parallel este prezentat in continuare.
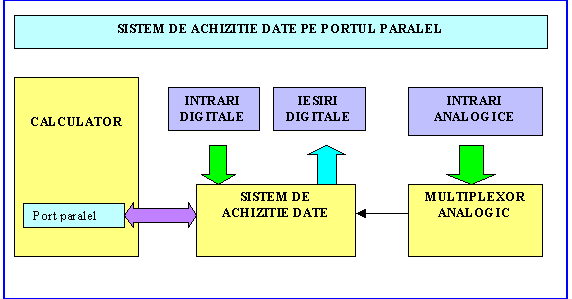
Sistemul de achizitie poate sa lucreze independent deci sa contina sisteme inteligente microprogramate sau poate sa fie o simpla interfata prin care calculatorul comanda achizitia si realizeaza transferul.
In cazul in care sistemul de achizitie este o simpla interfata comandata de calculator, programele de achizitie se afla in totalitate pe calculator, sistemul de achizitie este un element de executie. Are avantajul ca este foarte simplu, ieftin si flexibil. Intregul pachet de programme se afla pe calculator deci actualizarile si imbunatatirile de program se fac numai pe calculator. Principalul dezavantaj il constituie faptul ca sistemul depinde in totalitate de calculator neputind functiona independent de calculator.Daca sistemul este complex si pe langa moitorizare de date face si comanda, un astfel de sistem nu este prea indicat.
Pentru cazurile cand principala functie a sistemului este monitorizarea de date eventual pe langa monitorizare si cateva comenzi, un sistem controlat in totalitate de calculator, este potrivit.
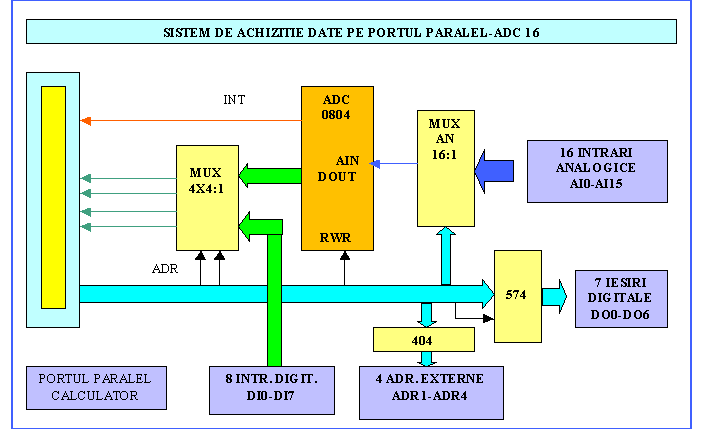
Dupa cum se vede in figura de sus sistemul de achizitie este comandat de calculator prin intermediul liniilor de control din portul parallel. Datele sunt citie prin cele patru linii de intrare. Iesirile de date utilizeaza magistrala de date a portului parallel. Avand in vedere ca nu toate calculatoarele dispun de port parallel bi-directional s-a preferat ca toate citirile de date sa se faca pe cele patru linii de intrare.
Datele vehiculate au dimensiunea de 8 biti (un octet). Pentru a putea fi citite s-au folosit 4 multiplexoare 4:1 din care doua pentru citirea datelor de la convertorul AD iar doua pentru citirea datelor de la portul de intrare. S-a folosit o linie de intrare special pentru semnalul INT de la convertorul A/D care indica sfirsitul conversiei.
Startul conversiei este dat de o iesire a portului parallel legata direct la intrarea RWR a convertorului ADC.
In vederea conectarii de multiplexoare suplimentare se mai furnizeaza patru linii de adresa direct din portul parallel cu specificatia ca sunt totusi amplificate prin patru porti logice 404.
Iesirile digitale sunt realizate prin bufferarea a 7 linii de date cu ajutorul circuitului 574 comandat de un semnal furnizat tot de portul parallel.
Pentru a creste numarul de intrari analogice se mai ataseaza multiplexoare analogice 16:1 Iesirile fiecarui multiplexor se conecteaza la cite o intrare analogical a sistemului ADC. Adresarea canalului corespunzator se face prin activarea corespunzatoare a liniilor de adresa ADR1-ADR4 Teoretic se pot atasa 16 multiplexoare adica cite un multiplexor pentru fiecare intrare analogica a sistemului ADC deci se pot realiza 256 de intrari analogice.
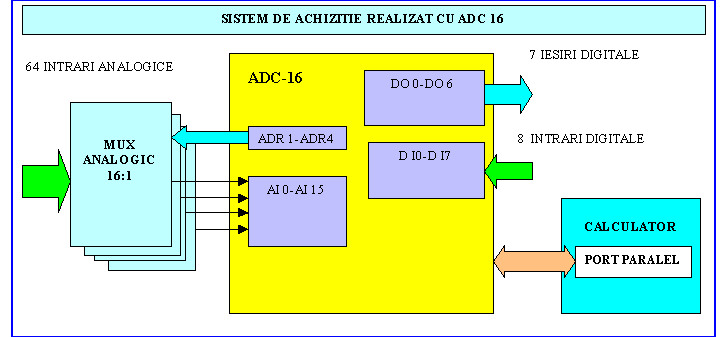
Frecventa de achizitie depinde de viteza de lucru a calculatorului precum si de numarul de canale analogice conectate.
Sistemul se preteaza pentru achizitii de date in care se cere o viteza de achizitie mai ridicata decit la sistemele cu comunicatie seriala.
Cu toate ca viteza este mai ridicata, nu se poate totusi compara cu viteza de achizitie a sistemelor de achizitie conectate direct pe magistrala interna a calculatorului.
Pentru sistemele industriale viteza oferita este acceptabila. Combinata cu pretul accesibil, fiabilitatea ridicata, si conectare extrem de simpla la calculator acest system este recomandabil pentru a conduce si monitoriza o gama diversa de procese industriale.
|
|
|
|
| Termen | Descriere |
| SCADA | Supervisory Control And Data Aquisition |
| CAN | Convertor analog numeric |
| DMA | Direct Memory Acces - se efectueaza transferul de date in paralel cu activitatea CPU |
| Pooling | Metoda prin care registrul de stare al placii de achizitie este citit periodic dictat de un timer al CPU e |
| Intreruperi | Metoda prin care placa de achizitie are capabilitatea de a intrerupe CPU de fiecare data cind trebuiesc transferate date |
| Rezolutia | Rezolutia este data de numarul de biti ai convertorului |
| Timpul de conversie | Timpul necesar pentru a obtine la iesire un semnal numeric proportional cu semnalul analogic de la intrare avand precizia dorita. |
|
|
|
|
|
|